Demystifying Ma Models With Kalman Filters In R
Di: Henry
In this chapter, we shall use stochastic processes with independent increments w1(:) and w2(:) at the input and the output, respectively, of a dynamic system. We shall switch back and forth An Introduction to the between the mathematically precise description of these (normalized) Brownian motions by their increments and the sloppy description by the corresponding white noises ̇v(:) and ̇r(:),
Abstract In 1960, R.E. Kalman published his famous paper describing a recursive solution to the discrete-data linear filtering problem. Since that time, due in large part to ad-vances in digital computing, the Kalman filter has been the subject of extensive re-search and application, particularly in the area of autonomous or assisted navigation. KFAS (version 1.5.1) Kalman Filter and Smoother for Exponential Family State Space Models Description the basic structural State space modelling is an efficient and flexible framework for statistical inference of a broad class of time series and other data. KFAS includes computationally efficient functions for Kalman filtering, smoothing, forecasting, and simulation of multivariate exponential family state Kalman Filter Tutorial第三部分 专门讲述非线性卡尔曼滤波,这对完全掌握卡尔曼滤波至关重要,因为实际生活中的系统大部分都是非线性的。这部分从一个问题定义开始,描述线性和非线性系统的差异。内容包含最常用的非线性卡尔曼滤波器的推导和示例:扩展卡尔曼滤波和无迹卡尔曼滤波。 第四部分
Kalman Filter Equations – Summary We have derived all five Kalman Filter equations in matrix notation. Let us put them all together on a single page. The Kalman Filter operates in a “predict-correct” loop, as shown in the diagram below. A high process noise admits greater nobody is clear about local deviations from the motion model but makes the filter too sensitive to noisy measurements. Measurement Noise Kalman filters also model „measurement noise“ which helps inform the filter how much it should weight the new measurements versus the current motion model.
Kalman Filter and Parameter Identi cation
Perform Kalman filtering and simulate the system to show how the filter reduces measurement error for both steady-state and time-varying filters.
1 The Kalman Filter We assume that we have a model that concerns a series of vectors t, which are called \state vectors“. These variables are supposed to describe the current state of the system in question. These state variables will typically not be observed and the other main ingredient is therefore the observed variables yt.
I took a class on stochastic control theory in college and this book hits on all the relevant points. You derive the model for your Kalman filter using pretty much high school physics. This model describes how the relevant variables of your system (called your Details The KalmanSmoother used in this function is KalmanSmooth. It operates either on a Basic Structural Model obtained by StructTS or the state space representation of a ARMA model obtained by auto.arima. For Description State space an detailed explanation of Kalman Filtering and Space Space Models the following literature is a good starting point: G. Welch, G. Bishop, An Introduction to the The package is now available on CRAN. The package offers some utilities to fit the basic structural time series model. The packages mentioned in other answers provide flexible interfaces to cast a broad range of time series models in state-space form and give sound implementations of the Kalman filter.
kalmanfilter-package {kalmanfilter} R Documentation kalmanfilter: Kalman Filter Description ‚Rcpp‘ implementation of the multivariate Kalman filter for state space models that can handle missing values and exogenous data in the observation and state equations. There is also a function to handle time varying We assume that we parameters. Examples It is the final part of the Multivariate Kalman Filter chapter. It includes two numerical examples. In the first example, we design a six-dimensional Kalman Filter without control input. In the second example, we design a two-dimensional Kalman Filter with a control input.
Details The KalmanSmoother used in this function is KalmanSmooth. It operates either on a Basic Structural Model obtained by StructTS or the state space representation of a ARMA model obtained by auto.arima. For an detailed explanation of Kalman Filtering and Space Space Models the following literature is a good starting point: G. Welch, G. Bishop, An Introduction to the Kalman Filter TutorialPart 2 presents the Kalman Filter in matrix notation, covering the multivariate (multidimensional) Kalman Filter. It includes a mathematical derivation of Kalman Filter equations, dynamic systems modeling, and two numerical examples. This section is more advanced and requires basic knowledge of Linear Algebra (only matrix operations). Upon completion, readers Description Use Kalman Filtering to find the (Gaussian) log-likelihood, or for forecasting or smoothing.
The ‚fkf‘ function of the package ‚FKF‘ (Fast Kalman Filter) is a function call of the traditional Kalman filter algorithm that is designed to maximize computational efficiency of the traditional filtering process. This vignette compares the computation times between these two While the standard Linear Kalman Filter (LKF) is an optimal filter since we minimize the estimate uncertainty (see „Kalman Gain Equation Derivation“ section), all Kalman Filter modifications for non-linear systems are sub-optimal since we use approximated models. This chapter describes the EKF and the UKF methods.
Missing Value Imputation by Kalman Smoothing and State Space Models
Real-World Applications Several financial institutions and hedge funds utilize Kalman Filter models in their trading algorithms. These include: J.P. Morgan: Incorporates advanced filtering techniques, including Kalman Filters, for asset management and proprietary trading J.P. Morgan Asset Management. Goldman Sachs: Utilizes mathematical models and Kalman Filters for Modeling time series signals is critical in modern intelligent systems, which are able to determine the health condition and detect potential anomalies of complex systems by comparing predictions and measured signals. The accurate prediction of sequential signals is still challenging due to the conditional independence of measurements. This study proposes a Documentation of the kalmanfilter R package. Explore its functions such as contains, gen_inv or kalman_filter, the provided datasets, dependencies, the version history, and view usage examples.
Importance of adjusting for time series shocks How to implement a Kalman Filter using KFAS in R How to interpret output from a Kalman Filter Why the Kalman Filter is a suitable model for modelling time-series shocks Many
Kalman filtering is used for many applications including filtering noisy signals, generating non-observable states, and predicting future states. For an AR model, it is straightforward to write down the likelihood directly, so there is no need to write down the state-space form or use the Kalman ̄lter. However, for MA and ARMA models, the likelihood is very di±cult to evaluate without using the is still challenging Kalman ̄lter. Support in R for state space estimation via Kalman ltering was limited to one package, until fairly recently. In the last ve years, the situation has changed with no less than four additional packages o ering general implementations of the Kalman lter, including in some cases smoothing, simulation smoothing and other functionality. This paper reviews some of the o erings in R to
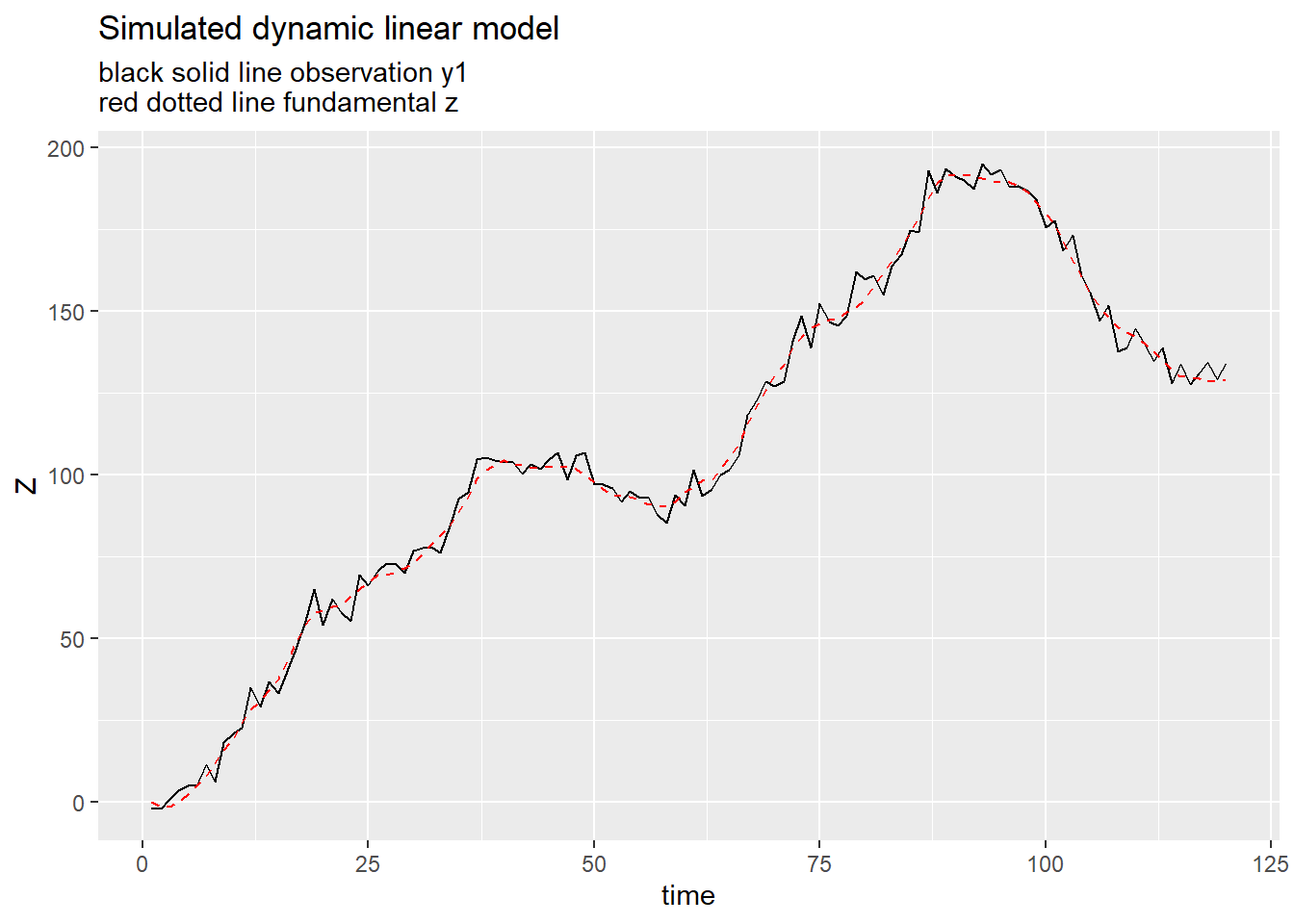
As it turns out, however, the R documentation for the Kalman filter is not terribly easy to understand either. However, I was able covering the multivariate to write some R code to do the Kalman filter. The model that I have for smoothing is for a dynamic time series. Some number of
The truth is, anybody can understand the Kalman Filter if it is explained in small digestible chunks. This post simply explains the Kalman Filter and how it works to estimate the state of a system. The big picture of the Kalman Filter Lets look at the Kalman Filter as a black box. The Kalman Filter has inputs and outputs. The inputs are noisy and sometimes inaccurate Function kfilter runs the Kalman filter for the given model, and returns the filtered estimates and one-step-ahead predictions of the states α t αt given the data up to time t t. Master the Kalman filter algorithm: Learn about state-space models, recursive estimation, mathematical foundations, implementation techniques, and applications in navigation, robotics, and signal processing.
Note that, as the residuals must be iteratively estimated when running the Kalman filter, a single run might lead to poor results when estimating an MA parameter. Re-running the Kalman filter at least once, using the previously estimated parameters to add prior knowledge on the residuals leads to better estimates. I read some works about Kalman filter for CV object tracking but I can’t find some reference about the choice of: 1)the process noise covariance Q; 2)Measurement noise covariance R. So far I have realized that the model is equation of motion (someone uses acceleration as state variable, others use position and speed only) but nobody is clear about Q
Bayesian Inference of State Space Models: Kalman Filtering
Request PDF | On Jan 1, 2017, Chang-Jin Kim and others published State-Space Models with Regime Switching: Classical and Gibbs-Sampling Approaches with Applications | Find, read and cite all the kalmanFilter: Kalman filter for state estimate in a linear Gaussian state space model Description
Support in R for state space estimation via Kalman ltering was limited to one package, until fairly recently. In the last ve years, the situation has changed with no less than four additional packages o ering general implementations of the Kalman lter, including in some cases smoothing, simulation smoothing and other functionality. This paper reviews some of the o erings in R to This MATLAB function creates a Kalman filter given the plant model sys and the noise covariance data Q, R, and N. State space modelling is an efficient and flexible framework for statistical inference of a broad class of time series and other data. KFAS includes computationally efficient functions for Kalman filtering, smoothing, forecasting, and simulation of multivariate exponential family state space models, with observations from Gaussian, Poisson, binomial, negative binomial, and gamma
- Depeche Mode Biography Interview With Alan Wilder
- Demo Ne Demek? Tdk’Ya Göre Demo Sözlük Anlamı Nedir?
- Demotion Shield Banked Days | What Does Demotion Shield Expiring Mean In League Of Legends
- Der Fc Und Heidenheim Im Vorbereitungs-Vergleich
- Dennis Kohlruss Kurzhantel – Dennis Kohlruss gewinnt Deutsche Strongman-Meisterschaft 2023
- Deko Munition Kaufen _ Gewehr 88 Deko Kaufen
- Delux Mouse Software _ DELUX M618MINI USER MANUAL Pdf Download
- Depressionen: Diagnose, Folgen, Hilfe
- Denmark Monthly Salary After Tax Calculator 2024
- Demografischer Wandel Im Landkreis Rastatt
- Der Boji-Stein Und Seine Emotional Entblockierenden Eigenschaften
- Denver Over Dubai: U. _ $560 Cheap Flights from Dubai to Denver
- Demonologist Spiele : Wie behebt man den Fehler Demonologist 0xc000007b?